Содержание
Тренажеры для дома своими руками (74 фото) » НА ДАЧЕ ФОТО
Body Solid Powerline pvkc83
Брусья, турник body Solid pvkc83
Брусья напольные body Solid
Body Solid pvkc83
Верхняя тяга body Solid Powerline plm180
Домашний турник Iron Gym (Айрон Джим)
Турник Iron Gym (Айрон Джим) Bradex (SF 0006)
Powertec WB-ms10
Турник, брусья домашние тренажеры tr002
Турник-брусья со скамьей DFC Power Tower g005
Турник, брусья домашние тренажеры tr002
Баттерфляй DFC homegym hm044
Брусья, турник body Solid pvkc83
Горизонтальная гиперэкстензия Impulse Sterling sl7013
Тренажер body Solid GLM-83
Тренажер Power Tower g005 DFC
Скамья Скотта body Solid Powerline ppb32
Турник универсальный Bradex SF 0006 «Айрон Джим»
Тренажер «кроссовер» body Solid
Тренажер со свободными весами body Solid gcbt380
Брусья body Solid GDIP-59
Тренажер турник-брусья-отжимания body-Solid gvkr82
Body Solid EXM-2000s
Силовая рама body Solid Powerline ppr178x/ppr200x
Турник DFC Power Tower g003
Body Solid FCD турник + брусья + пресс
Домашний турник Iron Gym (Айрон Джим)
Силовой комплекс body Solid g2b
Стойка DFC Power Tower g006
Тренажер «кроссовер» body Solid
Кроссовер угловой body-Solid gdcc200
Тренажер кроссовер м9246-Alok Grossover Cables
Боди Солид турник и брусья
DFC Power Tower g002
Турник-пресс-брусья body Solid Powerline pvkc83
Турник-пресс-брусья body Solid GKR-82/GVKR-82
Силовой комплекс DFC 7000
Силовой комплекс body Solid g3s
Регулируемая скамья для пресса body Solid gab-60
Скамья body Solid gab-60 серый
Тренажер бицепс/трицепс body-Solid s2btp
Многофункциональный тренажер body Solid g3s
Силовые комплексы DFC 7001
Тренажер мультистанция body-Solid Fusion f500
Эллиптический тренажер proxima veritas IPRO
Турник Atemi ATD-3
Баттерфляй body Solid GPM-65
Мультистанция body-Solid g3s
Тренажер DFC homegym hm019
Турник Protrain
Силовая рама body Solid Powerline ppr178x/ppr200x
Велотренажер Barry 24398/p/r
Силовой комплекс body Solid g3s
Тренажер со свободными весами body Solid plm180x
Турник домашние тренажеры tr003
Турник, брусья Weider webe99712
Body Solid EXM 2000
Боди Солид тренажеры кроссовер
Стойка турник record
Ironmaster super Bench Pro
Турник DFC VT-7006
Брусья body Solid (gvkr60)
Брусья, турник домашние тренажеры tr015
Силовая станция body-Solid g3s
Скамья для ног body Solid GLCE-65
Тренажер со встроенными весами body Solid s2pec-1
Шведская стенка Kett-up
Машина Смита body Solid Powerline psm144
Силовая скамья для жима body Solid GDIB-46l
Многофункциональный тренажер DFC homegym hm019
Силовая рама body Solid Powerline ppr178x/ppr200x
Body-Solid Powerline pvlp156x
Тренажер боди Солид тяга
Скамья body Solid gfid71
Тренажеры сделать самому своими руками
Возможность купить тренажер доступна не каждому. Уж слишком больно бьет цена по простому карману. Именно поэтому сегодня все чаще делают тренажеры своими руками. Конечно, эстетический вид значительно уступает тому, что мы видим в магазинах и рекламных роликах, но ведь главное — цель и результат. Сделав тренажеры своими руками, вы сможете получать такую же нагрузку, как и на покупных тренажерах. А со временем и совершенствовать их, подгоняя под свои потребности. Да и себестоимость таких тренажеров получается весьма маленькая, поскольку делается все из подручных материалов. Итак, самодельные тренажеры…
Уж слишком больно бьет цена по простому карману. Именно поэтому сегодня все чаще делают тренажеры своими руками. Конечно, эстетический вид значительно уступает тому, что мы видим в магазинах и рекламных роликах, но ведь главное — цель и результат. Сделав тренажеры своими руками, вы сможете получать такую же нагрузку, как и на покупных тренажерах. А со временем и совершенствовать их, подгоняя под свои потребности. Да и себестоимость таких тренажеров получается весьма маленькая, поскольку делается все из подручных материалов. Итак, самодельные тренажеры…
1. Тренажер своими руками. Лапа боксерская. Приготовьте прочную толстую ткань, маркер, клей, салфетки, скотч, ленту широкую (прекрасно подойдет подарочная). Возьмите ткань, сложите вдвое и нарисуйте овал (размеры, более удобные для вас, выбираете самостоятельно). Теперь вырежьте нарисованные овалы. Если ткань слишком плотная для того, что бы вырезать сразу оба слоя, нарисуйте такой же овал отдельно и вырезайте по одному. Теперь сложите второй кусок и нарисуйте уже прямоугольники (ориентируемся по овалам). Тоже вырежьте. Теперь склейте скотчем овалы с прямоугольниками. Каждый из получившихся карманов набейте салфетками. Заклеиваем отверстия. Обклеиваем лапу лентой, воспользовавшись клеем. Последний штрих: маркером на лапе рисуем круг. Готово.
Тоже вырежьте. Теперь склейте скотчем овалы с прямоугольниками. Каждый из получившихся карманов набейте салфетками. Заклеиваем отверстия. Обклеиваем лапу лентой, воспользовавшись клеем. Последний штрих: маркером на лапе рисуем круг. Готово.
2. Тренажер своими руками. Подвесной. Приготовьте ленты ремней безопасности (три, вместе с замками), трубки (полые, лучше взять кожаные или резиновые, понадобятся для ручек), скотч и веревку. Возьмите ленту в руки, один конец проденьте в замок и зафиксируйте (должна получиться окружность, но не очень большая). Теперь очередь трубки для ручки. Проденьте сквозь нее тот конец ленты, который свободен. Положение зафиксируйте крепким узлом. На той стороне, которая длиннее, сделайте петлю, а затем проденьте сквозь нее конец ленты (свободный) оберните вокруг получающегося узла, проденьте в петлю сверху и тщательно затяните. Теперь готовим вторую ленту, повторив все те же манипуляции. Когда все будет готово, возьмите за петли обе ленты и карабином соедините их. Теперь через карабин проденьте еще одну ленту, третью. Этой лентой тренажер прикрепится к крюку или балками (можно прикрепить и к дереву). Таким же узлом закрепите веревку на ручках, отрежьте лишнее.Узлы для безопасности обмотайте скотчем. Готово.
Теперь через карабин проденьте еще одну ленту, третью. Этой лентой тренажер прикрепится к крюку или балками (можно прикрепить и к дереву). Таким же узлом закрепите веревку на ручках, отрежьте лишнее.Узлы для безопасности обмотайте скотчем. Готово.
3. Тренажер своими руками. Штанга. Вспомним, из чего она состоит: гриф и блины. Вот их и заменим. В качестве грифа подойдет арматура или труба. Только диаметр должен быть не менее 4,5 см, иначе держать будет неудобно. Длина грифа будет зависеть от того, чем вы замените блины (здесь предлагается два варианта, а вы, включив фантазию, можете поискать другую замену). Прекрасно подойдут в качестве блинов жигулевские колеса. Два колеса приставляются внутренними частями друг к другу и соединяются. Проще всего это сделать при помощи проволоки, но лучше и надежнее — воспользоваться сваркой. Колеса можно взять и без камер или с камерами пробитыми. Пожалуй, это будет даже лучше: появится возможность утяжелять штангу, добавляя для веса металл под покрышку.
Можно сделать блины цементные. Понадобятся: форма (к примеру, ведро пластиковое), проволока. Разводим цемент, добавляем в него проволоку (она не даст распадаться форму при ударе) и вставляем посередине гриф. Ждем, пока застынет. Полностью. Второй блин делаем так же.
Осталось подумать, как закрепить блины. Это может быть кусочек резинового шланга, подогнанный по диаметру. Если блины планируется менять, лучше обратиться к сварщику, чтобы сделал «стоп» в виде браслета. Проще и надежнее всего — нарезная дырка и болт для зажима.
Как видите, соорудить тренажеры своими руками действительно достаточно просто. Представленные описания служат в качестве примеров. А желание и фантазия помогу вам сделать и другие тренажеры своими руками. Пробуйте…
Аудио и видео своими руками
Учебники, часто задаваемые вопросы, калькуляторы и примеры
для динамиков, кроссоверов, фильтров,
Электропроводка, домашняя автоматизация, безопасность и многое другое.
Учебники по сборке и тестированию динамиков
- Учебное пособие по сборке корпуса динамика — Шаги по сборке корпуса динамика с нуля.
- Учебное пособие по кроссоверу динамиков — Все этапы проектирования и создания кроссовера.
- Тестирование динамиков — Используйте компьютер и микрофон, чтобы проверить кривую отклика динамика.
- Соберите свой собственный микрофон для тестирования динамиков — Соберите недорогой высококачественный микрофон для тестирования водителя или места прослушивания.
Руководства / Часто задаваемые вопросы (FAQ)
- Подключение динамиков и усилителей — Все, что связано с подключением динамиков и усилителей.
- Настройка домашнего кинотеатра — Что отличает домашний кинотеатр от остальных.
- Базовый динамик своими руками — на что следует обратить внимание, прежде чем что-либо делать.
- Конструкция корпуса динамика — Что входит в конструкцию корпуса.

- Использование МДФ — Все, что вам нужно знать о сборке коробок из МДФ.
- Кроссоверы для динамиков — Некоторые правила построения и подключения кроссоверов.
- Звуковые термины — Основная информация об общих терминах и звуковых свойствах.

Схема кроссовера и акустическая система
- Конструктор корпусов динамиков (Справка) — определите оптимальные объемы корпуса и размеры портов для ваших драйверов.
- Калькулятор объема корпуса динамика (Помощь) — рассчитать объем корпуса по размерам корпуса или размеры по объему.
- Калькулятор герметичности или портирования (Справка) — какой тип корпуса лучше всего подходит для вашего драйвера.
- Калькулятор смещения динамика (Помощь) — определите, сколько места ваш драйвер занимает в корпусе динамика.
- 2-Way Crossover Designer (Помощь) — спроектируйте множество типов кроссоверов от 1-го до 6-го порядка.
- 3-Way APC Crossover Designer (Помощь) — спроектировать 3-полосный кроссовер APC 1-4 порядка.
- Режекторный фильтр серии (Справка) — спроектируйте LCR-фильтр для удаления этого пика отклика.
- Параллельный режекторный фильтр (Справка) — разработка параллельного фильтра-ловушки для удаления более широких пиков.
- Цепь ослабления драйвера (LPPad) (Помощь) — разработать L-Pad для снижения чувствительности водителя.
- Цепь выравнивания импеданса (Справка) — спроектируйте схему выравнивания импеданса, соответствующую сопротивлению драйвера.
- Contour Network (Помощь) — спроектируйте Contour Network для корректировки драйверов с возрастающей кривой отклика.
- Конструктор индуктора с воздушным сердечником (Помощь) — намотайте собственный индуктор с воздушным сердечником проводом малого сечения для перекрестной сети с низким сопротивлением.

Технология телевизионных и развлекательных систем, установка и подключение
- Телевизионные технологии — Информация о различных типах телевизоров.
- 3D в кинотеатре — Как работает 3D в кинотеатре и чем он отличается от домашнего.
- 3D дома — Что нужно знать о 3D-телевидении.
- ПК для домашнего кинотеатра — Варианты для создания собственного ПК с медиацентром, цифрового видеорегистратора или потоковых устройств.
- Типы проводов — Показывает различные провода, которые вы можете использовать в развлекательном центре.
- Настройка домашнего кинотеатра — Размещение динамиков, развлекательные центры и распределение звука.
- Образец соединений компонентов — Еще один взгляд на проводку системы.
- Преобразование провода — Как преобразовать провод, который у вас есть, в провод, который вам нужен.
- Электропроводка компонентов развлекательной системы — несколько образцов электрических схем для вашей системы с проводкой и инструкциями по просмотру.
- Создайте свою систему — Инструмент для подключения развлекательной системы. Создайте схему подключения и сохраните ее или отправьте другу.
 Создайте схему подключения и сохраните ее или отправьте другу.
Создайте схему подключения и сохраните ее или отправьте другу.Домашняя проводка — Будущая проводка/Структурированная проводка от Структурированная домашняя проводка .com
- Обзор структурированной проводки — Как в будущем провести проводку в вашем доме.
- Структурированный план электропроводки — Создание плана электропроводки для вашего дома.
- Примеры проектов — Некоторые примеры проектов, которые должны помочь вам в составлении плана.
- Руководство по компонентам проекта электропроводки — Какие детали и инструменты вам потребуются для электромонтажа.
- Как подключить проводку к дому — Что нужно для правильной и безопасной прокладки проводов.
- Электропроводка существующего дома — Как провести провода через стены после того, как ваш дом будет построен.
- Заделочные настенные панели — Как заделывать провода в розетках или динамиках.
- Панель проводки — Центральное место, к которому должны идти все провода.
Охранная сигнализация / Установка системы безопасности из структурированной домашней проводки

Ссылки производителей аудио/видео
- Все ссылки на аудио и видео
- Домашнее аудио/видео соединение
- Профессиональные аудиолинки
- Автомобильные аудиосистемы
Пассивные кроссоверные столы
- 1-й ,
2-й и
3-й заказ Перекидные столы Баттерворта с использованием только компонентов E24. - 2-й заказ Перекрестный стол Linkwitz-Riley с использованием только компонентов E24.
Основная аудиоинформация
- Определение терминов — Что означают все буквы, используемые в формулах.
- Метрические/Стандартные Преобразования — для расчета объемов коробки.
Basic Electronics
- Basic Electronics — Параллельное и последовательное подключение электрических компонентов.
- Резисторы, конденсаторы и катушки индуктивности — Различные типы и что вам нужно о них знать.
- Цветовые коды резисторов и идентификация других компонентов — что означают все эти цветные полосы.
Sample Audio Projects
- Домашние проекты — Прочие домашние проекты динамиков и электроники.
- Автомобильные проекты — Автомобильные аудиопроекты.
Отказ от ответственности
Информация на этом сайте предоставляется бесплатно. Вся информация, представленная на этом веб-сайте
предоставляется «КАК ЕСТЬ». Гарантия точности информации или приложения не предоставляется.
представленной здесь информации. Я не несу никакой ответственности или ответственности в отношении
точность или актуальность предоставленной информации. Используя, читая или посещая этот веб-сайт,
вы соглашаетесь быть пользователем предоставленной информации. Пользователь принимает на себя полную ответственность за
вся предоставленная информация. Хотя я стараюсь, чтобы информация на этом сайте была максимально точной,
нет никакой гарантии, что мои справочные материалы или материалы на этом сайте верны.
Эта информация предоставляется исключительно в справочных целях! Техническая информация указана
здесь только для общего применения. В случае сомнений всегда обращайтесь за помощью к профессионалу!
Crossover Tables
Crossover TablesPassive Crossover Design Tables
| Эллиот Саунд Продактс | Столы проектирования с пассивным кроссовером |
© Rod Elliott, май 2020 г.
Основной индекс
Указатель статей
Содержимое
- Введение
- 1 — Формулы проектирования двусторонней перекрестной сети
- 3 — Формулы проектирования трехсторонней перекрестной сети
- 4 — Компенсация импеданса
- Выводы
- Ссылки
Введение
Существует несколько доступных программ для проектирования кроссоверов, некоторые из них бесплатны, а другие имеют разные ценовые диапазоны. Нет никаких сомнений в том, что они могут облегчить вашу жизнь, но многие люди по-прежнему предпочитают «старые» методы. Вы также должны учитывать кривую обучения — для освоения большинства этих программ потребуется некоторое время. Я не даю рекомендаций по программному обеспечению для проектирования, но имейте в виду, что многим из них потребуются входные данные, которые могут быть недоступны в нужном формате. В этом случае (или когда подробные данные недоступны) вам нужно будет охарактеризовать драйверы самостоятельно, и может оказаться невозможным предоставить требуемые данные в нужном формате. Некоторые из этих программ представляют собой «обычные» исполняемые программы, в то время как другие используют электронные таблицы. Ни один из них не обязательно лучше или хуже другого, но нужно восхищаться объемом работы, проделанной для получения пригодных для использования результатов, независимо от того, как обрабатываются данные.
Нет никаких сомнений в том, что они могут облегчить вашу жизнь, но многие люди по-прежнему предпочитают «старые» методы. Вы также должны учитывать кривую обучения — для освоения большинства этих программ потребуется некоторое время. Я не даю рекомендаций по программному обеспечению для проектирования, но имейте в виду, что многим из них потребуются входные данные, которые могут быть недоступны в нужном формате. В этом случае (или когда подробные данные недоступны) вам нужно будет охарактеризовать драйверы самостоятельно, и может оказаться невозможным предоставить требуемые данные в нужном формате. Некоторые из этих программ представляют собой «обычные» исполняемые программы, в то время как другие используют электронные таблицы. Ни один из них не обязательно лучше или хуже другого, но нужно восхищаться объемом работы, проделанной для получения пригодных для использования результатов, независимо от того, как обрабатываются данные.
Большинство программ проектирования сложны по необходимости, и хотя они всегда дадут вам результат, он может быть только настолько хорош, насколько хороши данные, которые вы можете предоставить. Таблицы и формулы, показанные здесь, могут работать с любым драйвером , при условии, что вы знаете, как измерить характеристики и/или обеспечить компенсацию импеданса, чтобы драйверы казались резистивными в области кроссовера.
Таблицы и формулы, показанные здесь, могут работать с любым драйвером , при условии, что вы знаете, как измерить характеристики и/или обеспечить компенсацию импеданса, чтобы драйверы казались резистивными в области кроссовера.
Приведенные ниже таблицы можно использовать для расчета пассивных фильтров (первого, второго, третьего и четвертого порядка) в 2-полосных и 3-полосных перекрестных сетях. После принятия решения о желаемой топологии вам необходимо знать исправил импеданс твитера, вуфера и среднечастотника (для 3-х полосной сети). Есть довольно много конфигураций, которые я не упомянул, потому что они либо неоптимальны, либо слишком далеки от «обычных» выравниваний. Если вы хотите всех формул, я предлагаю вам купить книгу, показанную в Справочнике № 1 (или последнюю редакцию). Есть много других текстов на ту же тему, но у меня их нет и я не могу комментировать их полезность.
Для 2-полосных систем для мидбаса/вуфера почти всегда требуется сеть Цобеля, чтобы скорректировать рост импеданса из-за L e (индуктивность звуковой катушки). Для твитера также почти всегда потребуется режекторный фильтр для подавления резонансного пика как для 2-полосных, так и для 3-полосных систем. Хотя сконструировать фильтр, работающий без какой-либо компенсации импеданса, безусловно, возможно, сделать это будет намного труднее и трудоемче.
Для твитера также почти всегда потребуется режекторный фильтр для подавления резонансного пика как для 2-полосных, так и для 3-полосных систем. Хотя сконструировать фильтр, работающий без какой-либо компенсации импеданса, безусловно, возможно, сделать это будет намного труднее и трудоемче.
В 3-полосной системе среднечастотному динамику может потребоваться как сеть Цобеля , так и режекторный фильтр , в зависимости от его резонансной частоты. В вырезе может не быть необходимости, если резонанс более чем на две октавы ниже частоты кроссовера (например, резонанс средних частот на частоте 75 Гц для частоты кроссовера 1300 Гц). Это то, что необходимо тщательно протестировать, прежде чем вы узнаете, вызывает ли это какие-либо измеримые (или слышимые) проблемы. Все формулы основаны на предположении, что импеданс драйвера равен резистивная , при необходимости уравняв. Используйте ли , а не номинальный импеданс драйверов, так как результаты будут крайне непредсказуемыми.
Показанные схемы не включают эквалайзер импеданса . См. сопутствующую статью «Компенсация импеданса для пассивных кроссоверов».
Перед использованием этих таблиц необходимо определить коррекцию импеданса драйвера и использовать измеренное (откорректированное) сопротивление. Обычно это снижает импеданс каждого драйвера примерно на 20 % или более, при этом среднее значение примерно равно электрическому сопротивлению звуковой катушки драйвера (r и ). Отсутствие эквалайзера импеданса обычно приводит к неудовлетворительному конечному результату, и имейте в виду, что схемы эквалайзера добавят гораздо больше деталей (катушки индуктивности, конденсаторы и резисторы). Здесь не предусмотрено определение относительных уровней каждого драйвера, и, вероятно, потребуются L-образные прокладки для высокочастотных и среднечастотных драйверов, чтобы обеспечить соответствие их уровней низкочастотному динамику. Убедитесь, что низкочастотный динамик имеет наименьшую эффективность (в дБ/Вт/м), иначе будет сложно получить правильные уровни.
Значения компонентов кроссовера рассчитываются с использованием следующих формул (адаптировано из «Поваренной книги по проектированию громкоговорителей» Вэнса Дикасона). Охвачены не все варианты, а только те, которые широко используются, а «эзотерические» версии были исключены, чтобы сделать таблицы более читабельными. Убедитесь, что вы используете правильную таблицу, особенно для 3-полосных конструкций. Значения различаются в зависимости от верхней и нижней точек пересечения. Формулы представлены для диапазона 10 (например, от 300 Гц до 3 кГц, 3,4 октавы) и диапазона 8 (например, от 375 Гц до 3 кГц, 3 октавы).
Принципиальные схемы показаны для сетей 1 st , 2 nd и 3 rd (6 дБ, 12 дБ и 18 дБ/октава соответственно). Я не включил схемы для цепей 4 th порядка, потому что их сложность и чувствительность компонентов таковы, что получить хороший результат будет либо чрезвычайно сложно/дорого, либо (обычно) и то, и другое. Выравнивание импеданса становится (даже более) критичным, и небольшие ошибки могут вызвать большие отклонения в производительности. Это не означает, что это невозможно сделать, но стоимость такова, что активные фильтры (и несколько усилителей) обеспечат лучшую, более предсказуемую производительность при меньших финансовых затратах и значительно сниженном риске отказа.
Это не означает, что это невозможно сделать, но стоимость такова, что активные фильтры (и несколько усилителей) обеспечат лучшую, более предсказуемую производительность при меньших финансовых затратах и значительно сниженном риске отказа.
Хотя вы можете выбрать любое выравнивание в соответствии с вашими потребностями, те, которые я рекомендую, отмечены звездочкой/звездочкой (*). Емкость в фарадах, индуктивность в генри, сопротивление/импеданс в омах.
1 — Формулы проектирования двусторонней перекрестной сети
| 1 -й заказ Butterworth * | ||
|---|---|---|
| C1 | 0,159 / R H F | |
| L1 |
Рисунок 1. 2-полосный кроссовер 6 дБ/октава
В то время как выше показана параллельная сеть, IMO, сеть серии предпочтительнее для двухсторонних систем первого порядка. Хотя они теоретически идентичны с резистивной нагрузкой вместо драйверов динамиков, последовательная сеть не нуждается в компенсации импеданса. Подробнее об этой (немного необычной) конфигурации см. в статье Пассивные кроссоверы 6 дБ/октава.
Хотя они теоретически идентичны с резистивной нагрузкой вместо драйверов динамиков, последовательная сеть не нуждается в компенсации импеданса. Подробнее об этой (немного необычной) конфигурации см. в статье Пассивные кроссоверы 6 дБ/октава.
2 -й Заказ 2-ходовой
| 2nd Order Butterworth | 2nd Order Linkwitz-Riley * | |||||||
|---|---|---|---|---|---|---|---|---|
| C1 | 0.0912 / ( r H f ) | 0.0796 / ( r H f ) | ||||||
| C2 | 0.0912 / (R L F) | 0,0796 / (R L F) | ||||||
| L1 | 0,2756 R H / F | 0,31833. R H / F | 0,31833333.0356 H / f | |||||
| L2 | 0,2756 r L / f | 0,3183 r L / f |
| Баттерворта 3-го порядка * | Бесселя 3-го порядка | |
|---|---|---|
| C1 | 0,1061 / ( r H |
f )
1 / ( r H f )
 3183 / ( r H f )
3183 / ( r H f )
Рис. 3. 2-полосный кроссовер 18 дБ/октава
4 й Заказ 2-ходовой
| 4th Order Butterworth | 4th Order Linkwitz-Riley * | |
|---|---|---|
| C1 | 0.1040 / ( r H f ) | 0.0844 / ( r H f) |
| C2 | 0.1470 / ( r H f ) | 0. 1688 / ( r H f) 1688 / ( r H f) |
| C3 | 0.2509 / ( r L f ) | 0.2533 / ( r L f) |
| C4 | 0.0609 / ( r L f ) | 0.0563 / ( r L f) |
| L1 | 0.1009 r H / f | 0,1000 r H / f |
| L2 | 0.4159 r H / f | 0.4501 r H / f |
| L3 | 0.2437 r L / f | 0.3000 r L / f |
| L4 | 0,1723 r L / f | 0,1500 r L / f |
Цепь сети 4 -го порядка не показана, так как ее сложность такова, что сети 4-го -го порядка лучше всего достигаются с использованием активных фильтров. Пассивные фильтры высокого порядка не рекомендуются. Стоимость и сложность быстро становятся такими, что стоимость будет намного выше, чем у активного решения. Это особенно верно, когда вы рассматриваете чувствительность компонентов — используемые детали должны быть выбраны с жесткими допусками, иначе отклик фильтра не будет точным. 9 0,5
Это особенно верно, когда вы рассматриваете чувствительность компонентов — используемые детали должны быть выбраны с жесткими допусками, иначе отклик фильтра не будет точным. 9 0,5
Выберите f H / f L как 10 (3,4 октавы) или 8 (3 октавы)
| Нормальная полярность 1-го порядка * f H /f L = 10 | Нормальная полярность 1-го порядка * f H /f L = 8 | |
|---|---|---|
| C1 | 0.1590 / ( r H f H ) | 0.1590 / ( r H f H ) |
| C2 | 0.5540 / ( r M f M ) | 0.5070 / ( r M f M ) |
| L1 | 0.0458 r M / f M | 0.0500 r M / f M |
| L2 | 0. 1592 r L / f L 1592 r L / f L | 0.1592 r L / f L |
Рис. 4. 3-полосный кроссовер 6 дБ/октава
2 -й Заказ 3-ходовой
| 2-й порядок (обратная полярность средних частот) * f H /f L = 10 | 2-й порядок (обратная полярность средних частот) * F H / F L = 8 | ||||
|---|---|---|---|---|---|
| C1 | 0,0791 / (R H F H ) | 0,0387 / (R H ) | 0,038866 H ). | 0.3236 / ( r M f M ) | 0.3046 / ( r M f M ) |
| C3 | 0.0227 / ( r M f M ) | 0.0248 / ( r M f M ) | |||
| C4 | 0.0791 / ( r L f L ) | 0.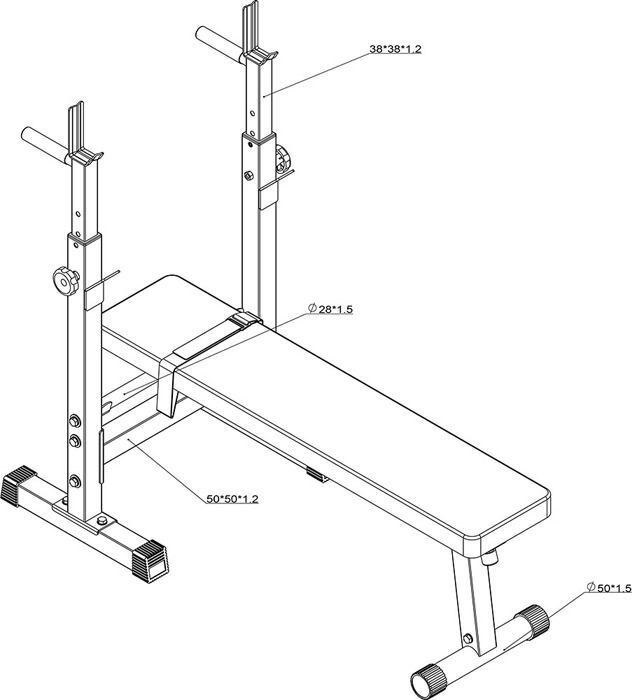 0788 / ( r L f L ) 0788 / ( r L f L ) | |||
| L1 | 0,3202 г Н / ф Н | 0.3217 r H / f H | |||
| L2 | 1.0291 r M / f M | 0.9320 r M / f M | |||
| L3 | 0.0837 r M / f M | 0.0913 r M / f M | |||
| L4 | 0.3202 r L / f L | 0.3217 r L / f L | |||
| Усиление полосы пропускания 2,08 дБ | Усиление полосы пропускания 2,45 дБ |
Рис. 5. 3-полосный кроссовер 12 дБ/октава
3 rd Заказ 3-ходовой
| Нормальная полярность 3-го порядка * f H / f L = 10 | Нормальная полярность 3-го порядка * f H / f L = 8 | ||
|---|---|---|---|
| C1 | 0. 1138 / ( r H f H ) 1138 / ( r H f H ) | 0.1158 / ( r H f H ) | |
| C2 | 0.2976 / ( r H f H ) | 0.2927 / ( r H f H ) | |
| C3 | 0.0765 / ( r M f M ) | 0.0884 / ( r M f M ) | |
| C4 | 0,3475 / ( r M f M ) | 0.3112 / ( r M f M ) | |
| C5 | 1.068 / ( r M f M ) | 0.9667 / ( r M f M ) | |
| C6 | 0,2127 / (R L F L ) | 0,2130 / (R L F L ) | 0,1189 г Н / f H |
| L2 | 0. 0598 r M / f M 0598 r M / f M | 0.0634 r M / f M | |
| L3 | 0.0253 r M / f M | 0.0284 r M / f M | |
| L4 | 0.3789 r M / f M | 0.3395 r M / f M | |
| L5 | 0.2227 r L / f L | 0.2187 r L / f L | |
| L6 | 0.0852 r L / f L | 0.0866 r L / f L | |
| Усиление полосы пропускания 0,85 дБ | Усиление полосы пропускания 0,99 дБ |
Рис. 6. 3-полосный кроссовер 18 дБ/октава
4 й Заказ 3-ходовой
| Нормальная полярность 4-го порядка * f H / f L = 10 | Нормальная полярность 4-го порядка * F H / F L = 8 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| C1 | 0,0848 / (R H F H ) | 0,0349356 H ) | 0,0349666 H ) | 0,0349666 H ) | 0,0349666 H ) | 0,0357 H H ) | 0,0357 H H ) | 0,1686 / ( r H f H ) | 0,1685 / ( r H f H ) |
| C3 | 0,3843 / (R M F M ) | 0,3774 / (R M F M ) (R M F M ) (R M F M )) (R M F M ) / (R M ) | 0,5332 / (R M F M ) | ||||||
| C5 | 0,0728 / (R M F 6. 6. 6. 6). М ) | ||||||||
| С6 | 0.0162 / ( r M f M ) | 0.0178 / ( r M f M ) | |||||||
| C7 | 0.2523 / ( r L f L ) | 0.2515 / (R L F L ) | |||||||
| C8 | 0,0567 / (R L F L ) | 0,0569 / (R L ) | 0,0569 / (R L ) | 0,0569 / (R L ) | 0,0569 / (R L ) | 0,0569 / (R L ) | 0,1004 r H / f H | 0. 1007 r H / f H 1007 r H / f H | |
| L2 | 0.4469 r H / f H | 0.4450 r H / f H | |||||||
| L3 | 0.2617 r M / f M | 0.2224 r M / f M | |||||||
| L4 | 1.423 r M / f M | 1.273 r M / f М | |||||||
| L5 | 0.0939 r M / f M | 0.1040 r M / f M | |||||||
| L6 | 0.0445 r M / f M | 0.0490 r M / f M | |||||||
| L7 | 0.2987 r L / f L | 0.2983 r L / f L | |||||||
| L8 | 0.1502 r L / ф L | 0,1503 R L / F L | |||||||
.
Цепь сети 4 -го порядка не показана, так как ее сложность такова, что сети 4-го -го порядка лучше всего достигаются с использованием активных фильтров. Пассивные фильтры высокого порядка не рекомендуются, и в первую очередь следует рассмотреть активную систему.
Имейте в виду, что, несмотря на то, что эти таблицы были созданы с максимальной тщательностью, могут быть ошибки, особенно с константами, используемыми для каждой формулы. Я говорил об этом бесчисленное количество раз, но достаточно взглянуть на трехполосный пассивный кроссовер 4 th порядка, чтобы понять, что его сборка будет очень дорогой. Мало того, что у вас есть компоненты кроссовера, вам также требуется компенсация импеданса для драйверов, иначе результаты будут непредсказуемыми (и редко в хорошем смысле). Фильтры чувствительны даже к небольшим изменениям, а если учесть еще и нагрев звуковых катушек во время громких пассажей (или если вы слушаете на большой громкости), то кроссовер испорчен довольно сильно. Единственным разумным подходом к кроссоверам высокого порядка является использование активных цепей. Да, вам нужен усилитель для каждого драйвера, но их легко (и сравнительно дешево) собрать самостоятельно, а конечным результатом будет бескомпромиссная система. Вам не нужна компенсация импеданса или , а конкурирующая система превзойдет любую пассивную сеть. В катушках индуктивности или резисторах потери мощности нулевые, демпфирование низкочастотного динамика не подвергается риску, а частоты кроссовера не меняются, если звуковая катушка нагревается. По-прежнему имеет место потеря уровня (из-за более высокого импеданса), но это незначительный побочный эффект по сравнению с основными изменениями, происходящими в пассивной сети. 4 — Компенсация импеданса Поскольку драйверы динамиков являются реактивными, они имеют импеданс , а не сопротивление в звуковом диапазоне. Здесь не показаны необходимые процессы проектирования для компенсации импеданса. Они подробно описаны в сопутствующей статье «Компенсация импеданса для пассивных кроссоверов». Рис. 7. Сети выравнивания импеданса Важно отметить, что на приведенном выше рисунке показаны только цепи компенсации импеданса. Кроссоверная сеть в дополнение к тому, что показано, добавляет еще больше частей. Возможно (по крайней мере теоретически) построить кроссовер, который не требует полной компенсации, но это будет эмпирический (т. В общем, твитеры почти всегда нуждаются в режекторной схеме для выравнивания резонансного пика (обычно где-то между 700 Гц и 1,2 кГц или около того) и редко нуждаются в цепи Зобеля, потому что индуктивность звуковой катушки, как правило, довольно низкая. Драйверы средних частот требуют сети Zobel для выравнивания импеданса на более высоких частотах. L-Pad обычно требуется для снижения уровня твитера, чтобы он соответствовал низкочастотному или средне-басовому динамику. Режекторный фильтр необходим, если среднечастотный резонанс меньше двух октав от частоты кроссовера бас-среднечастотный. Низкочастотным динамикам (или средне-низкочастотным динамикам в двухполосной системе) требуется только сеть Zobel, чтобы противодействовать повышению импеданса из-за индуктивности звуковой катушки. Не требуется, чтобы режекторная сеть выравнивала резонансный пик НЧ/СЧ, и даже попытки сделать это бесполезны. Требуются очень высокие значения емкости и индуктивности, что приведет к значительным затратам без всякой пользы. Хотя это может сделать электрический импеданс более «приятным», это никоим образом не изменит акустические характеристики вуфера. Если вам удастся получить идеально ровную характеристику импеданса во всем диапазоне для каждого драйвера, результаты будут действительно очень хорошими. Обратите внимание, что ни одна из этих сетей не требуется для активной системы, поскольку импеданс громкоговорителей не может влиять на характеристики сети кроссовера. Выводы Несмотря на первоначальное появление, эта статья призвана отговорить потенциальных производителей громкоговорителей от использования пассивных сетей. Вполне могут быть исключения из приведенных выше основных комментариев, и довольно легко потратить более 100 тысяч долларов на пару «первоклассных» громкоговорителей. Ожидается (или, по крайней мере, надеется), что если вы потратите так много, вы получите лучшее из всего, но это не обязательно так. Некоторые производители полагаются на свою репутацию, чтобы оправдать заоблачные цены, и могут срезать углы, как и их более мелкие конкуренты. При наличии достаточного количества времени, терпения и тестового оборудования можно «настроить» перекрестную сеть так, чтобы она преднамеренно включала характеристики драйвера, чтобы получить окончательную систему, которая не была бы настолько сложной, чтобы сделать систему недоступной для целевого рынка. Некоторые могут даже не особо заморачиваться и продавать систему с заявлениями о «волшебной» производительности, «музыкальности» или просто с несколькими озорными выдумками о ее «превосходной» производительности. Примечательно, что ни один производитель громкоговорителей не будет когда-либо расскажут вам о каких-либо ограничениях, и все, кажется, постоянно продолжают делать «лучшую в мире» систему. Вы часто будете видеть ссылки на «озвучивание» системы, что означает, что она была изменена дизайнером, чтобы она звучала так, как ему/ей нравится. Некоторые слушатели/рецензенты согласятся, другие не согласятся. В результате вы увидите множество схем кроссовера, которые кажутся слишком простыми, чтобы быть эффективными, но их все же можно заставить звучать хорошо для среднего (и часто выше среднего) слушателя. Когда для ослабления твитера используется L-образный пэд, требования к режекторной схеме ослабляются, поскольку параллельное сопротивление уменьшает амплитуду пика импеданса. В полностью активной системе при смене драйвера требуется лишь небольшая корректировка с учетом различной чувствительности. Поскольку компенсация импеданса не требуется, сменный драйвер должен звучать почти так же, как и оригинальный, при условии, что он имеет эквивалентную частотную характеристику, жесткость конуса и отсутствие «артефактов», вызывающих окраску (басовые драйверы являются исключением, особенно при использовании в вентилируемый корпус). В пассивной системе сети компенсации импеданса почти всегда должны быть изменены, а также, возможно, потребуется изменить кроссовер, если выровненный импеданс не идентичен исходному. Я рекомендую всегда использовать для активной системы, но просто биампинг может быть значительным улучшением по сравнению с полностью пассивным кроссовером. Это означает отдельные усилители для низкочастотного динамика и средних и высоких частот с пассивной сетью между средним и высокочастотным динамиками. Он устраняет очень большие (и дорогие) детали, необходимые для сети низкочастотного кроссовера, а изменения, необходимые, если вы хотите использовать другой среднечастотный или высокочастотный динамик, сведены к минимуму. Нет, это, вероятно, не будет соответствовать полностью активной системе, но это жизнеспособная альтернатива полному 3-полосному (или, черт возьми, 4-полосному) пассивному кроссоверу. Каталожные номера
Другие ссылки взяты из статей ESP, которые охватывают широкий спектр вариантов. |

 Из-за повторяющегося характера этих данных очень легко «перепутать» цифру, и это повлияет на результат формулы. Кроме того, очень важно использовать правильную конфигурацию фильтра средних частот. Если изменить порядок фильтров нижних и верхних частот, вы можете получить больше неравномерности в полосе пропускания (отклонения от плоской для суммарного отклика). С осторожностью можно добиться, чтобы суммарная характеристика имела неравномерность не более ±0,5 дБ, и нереально ожидать, что она будет намного лучше.
Из-за повторяющегося характера этих данных очень легко «перепутать» цифру, и это повлияет на результат формулы. Кроме того, очень важно использовать правильную конфигурацию фильтра средних частот. Если изменить порядок фильтров нижних и верхних частот, вы можете получить больше неравномерности в полосе пропускания (отклонения от плоской для суммарного отклика). С осторожностью можно добиться, чтобы суммарная характеристика имела неравномерность не более ±0,5 дБ, и нереально ожидать, что она будет намного лучше. Это происходит даже с небольшими изменениями — всего пара ом может иметь удивительно большое значение.
Это происходит даже с небольшими изменениями — всего пара ом может иметь удивительно большое значение. Это означает, что нагрузка, подаваемая на усилитель или кроссовер, зависит от частоты, как показано на любой кривой импеданса, которую вы хотите исследовать. Для правильной работы пассивного кроссовера (за единственным исключением для двухполосной сети серии первого порядка) драйверы должны быть резистивными в диапазоне не менее 1,5 октавы (предпочтительно 2 октавы). ) по обе стороны от каждой частоты кроссовера. Используются следующие схемы, предполагающие 3-полосную систему.
Это означает, что нагрузка, подаваемая на усилитель или кроссовер, зависит от частоты, как показано на любой кривой импеданса, которую вы хотите исследовать. Для правильной работы пассивного кроссовера (за единственным исключением для двухполосной сети серии первого порядка) драйверы должны быть резистивными в диапазоне не менее 1,5 октавы (предпочтительно 2 октавы). ) по обе стороны от каждой частоты кроссовера. Используются следующие схемы, предполагающие 3-полосную систему. е. метод проб и ошибок) процесс. Некоторые люди будут лучше, чем другие, и существуют различные компьютерные программы, которые могут создать дизайн, при условии, что все характеристики драйвера известны (и точны). Почти наверняка окончательный дизайн потребует некоторых корректировок, потому что параметры динамиков будут меняться в зависимости от размера корпуса, примененного демпфирования или даже резонансов панели.
е. метод проб и ошибок) процесс. Некоторые люди будут лучше, чем другие, и существуют различные компьютерные программы, которые могут создать дизайн, при условии, что все характеристики драйвера известны (и точны). Почти наверняка окончательный дизайн потребует некоторых корректировок, потому что параметры динамиков будут меняться в зависимости от размера корпуса, примененного демпфирования или даже резонансов панели. Например, для частоты кроссовера 300 Гц резонанс СЧ (в его корпусе) должен быть не выше 75 Гц. Можно использовать упрощенную схему для подавления резонансного пика, но я бы на это не рассчитывал. L-Pad почти всегда необходим для 3-полосных систем, потому что сеть фильтров обеспечивает до 2 дБ «усиления» для среднечастотного выхода. L-Pad должен , а не , можно использовать на СЧ-динамике.
Например, для частоты кроссовера 300 Гц резонанс СЧ (в его корпусе) должен быть не выше 75 Гц. Можно использовать упрощенную схему для подавления резонансного пика, но я бы на это не рассчитывал. L-Pad почти всегда необходим для 3-полосных систем, потому что сеть фильтров обеспечивает до 2 дБ «усиления» для среднечастотного выхода. L-Pad должен , а не , можно использовать на СЧ-динамике. Однако значения всех компонентов кроссовера являются критическими, и приведенные формулы не учитывают сопротивление дросселя. Это всегда снижает чувствительность среднечастотных и низкочастотных динамиков. Очень важно измерить чувствительность драйверов в корпусе, для которого они предназначены, поскольку все имеет значение. Резонансная частота мидбаса, средних частот и вуферов зависит от корпуса и количества используемого акустического заполнения. Если окончательная чувствительность не будет измерена, будет очень сложно правильно рассчитать L-Pad. Калькулятор для расчета значений, необходимых для L-Pad, см. в разделе Расчеты L-Pad для громкоговорителей.
Однако значения всех компонентов кроссовера являются критическими, и приведенные формулы не учитывают сопротивление дросселя. Это всегда снижает чувствительность среднечастотных и низкочастотных динамиков. Очень важно измерить чувствительность драйверов в корпусе, для которого они предназначены, поскольку все имеет значение. Резонансная частота мидбаса, средних частот и вуферов зависит от корпуса и количества используемого акустического заполнения. Если окончательная чувствительность не будет измерена, будет очень сложно правильно рассчитать L-Pad. Калькулятор для расчета значений, необходимых для L-Pad, см. в разделе Расчеты L-Pad для громкоговорителей. Довольно легко увидеть, что сложность пассивных сетей намного выше, чем часто ожидается, и окончательная стоимость будет отражать это. Немногие коммерческие акустические системы включают в свои конструкции все, что здесь описано, и это результат основной цели — создать систему, которую можно продавать с разумной прибылью. Обычно можно ожидать, что производитель потратил сотни часов на тестирование различных комбинаций компонентов драйвера и кроссовера, чтобы получить продукт, который удовлетворит покупателей (и рецензентов!) в своем ценовом диапазоне.
Довольно легко увидеть, что сложность пассивных сетей намного выше, чем часто ожидается, и окончательная стоимость будет отражать это. Немногие коммерческие акустические системы включают в свои конструкции все, что здесь описано, и это результат основной цели — создать систему, которую можно продавать с разумной прибылью. Обычно можно ожидать, что производитель потратил сотни часов на тестирование различных комбинаций компонентов драйвера и кроссовера, чтобы получить продукт, который удовлетворит покупателей (и рецензентов!) в своем ценовом диапазоне. Если у вас нет доступа к перекрестным сетям или, по крайней мере, к схеме, вы не знаете. Точно так же вам также необходимо знать параметры Тиле-Смолла для всех используемых драйверов, потому что они диктуют выравнивание импеданса, необходимое для получения плоского импеданса на частотах кроссовера.
Если у вас нет доступа к перекрестным сетям или, по крайней мере, к схеме, вы не знаете. Точно так же вам также необходимо знать параметры Тиле-Смолла для всех используемых драйверов, потому что они диктуют выравнивание импеданса, необходимое для получения плоского импеданса на частотах кроссовера. Графики частотной характеристики могут быть созданы с использованием чрезмерного «сглаживания», чтобы вы не видели изменений амплитуды, а другие могут брать среднее значение нескольких тестов под разными углами. Количество акустических систем, которые все претендуют на славу, поражает, и громкоговорители по-прежнему остаются самым слабым звеном в аудиоцепочке. Различия (обычно) отчетливо слышны даже у моделей одного и того же производителя.
Графики частотной характеристики могут быть созданы с использованием чрезмерного «сглаживания», чтобы вы не видели изменений амплитуды, а другие могут брать среднее значение нескольких тестов под разными углами. Количество акустических систем, которые все претендуют на славу, поражает, и громкоговорители по-прежнему остаются самым слабым звеном в аудиоцепочке. Различия (обычно) отчетливо слышны даже у моделей одного и того же производителя. Существуют и другие приемы, которые можно использовать (например, настройка фильтра верхних частот для работы в качестве «мостовой Т-сети») наряду с выгодным использованием характеристик драйвера. Большинство таких сетей будут работать только с оригинальными драйверами, использованными в проекте, а замена часто приводит к изменению системы — часто значительно и почти всегда в худшую сторону.
Существуют и другие приемы, которые можно использовать (например, настройка фильтра верхних частот для работы в качестве «мостовой Т-сети») наряду с выгодным использованием характеристик драйвера. Большинство таких сетей будут работать только с оригинальными драйверами, использованными в проекте, а замена часто приводит к изменению системы — часто значительно и почти всегда в худшую сторону. Это серьезно ограничивает ваши возможности для обмена водителями, потому что в игру вступает очень много взаимозависимых факторов.
Это серьезно ограничивает ваши возможности для обмена водителями, потому что в игру вступает очень много взаимозависимых факторов.